
Axsis توانایی طراحی هوشمند رباتیک را نشان می دهد. یک ربات جراحی که به طرز چشمگیری کوچکتر بوده و با این حال توانایی های بیشتری از دستگاه های فعلی دارد.
Axsis مفهوم روباتیک پزشکی
چشم انداز آینده رباتیک جراحی
ساختاری مینیاتورسازی شده
استفاده از ابزارهای انعطاف پذیر و یک پیکربندی جدید موتور که کوچک تر از یک بطری نوشیدنی است و طراحی واکنش گرا و حرکت بی نقصی دارد.
 |  |
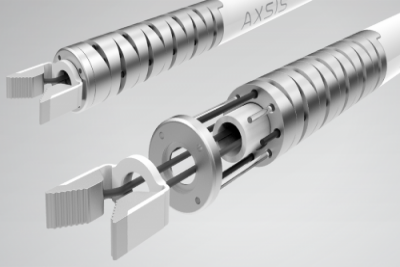
ساختار داخلی حAxsis
بازوی 1.8 میلیمتری و با یک کانال 1 میلیمتری کار میکند، چهار حالت از آزادی حرکت را با توانایی اعمال نیروهای چند جهته ، محوری، مماس و گرفتن بدون هیچ حرکت خارجی ترکیب می کند.
 |  |
Axsis طراحی شده برای کار در محدودیت های اتاق های عملیاتی دنیای واقعی.
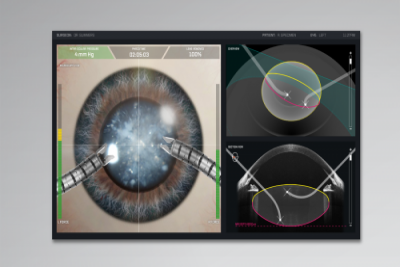
پردازش تصویر و هوش مصنوعی
دارای قابلیت تصویر برداری سه بعدی بصورت آنی، و سطح جدیدی از کمک روباتیک را فراهم کرده؛ مرزبندی مجازی، جراحی "ماکروه" و استفاده از هوش مصنوعی (AI) برای اطلاع رسانی و کمک به عمل جراحی.
Axsis یک جهش عظیم در توسعه جراحی آب مروارید نشان می دهد که توانایی ساده سازی و خودکار سازی روش های جراحی که اغلب انجام شده در دنیای غرب است. کدورت کپسول (Posterior capsular) یکی از رایج ترین عارضه در 350،000 موارد از عمل های جراحی انجام شده در انگلستان در هر سال است. یک ربات "با تجربه" مانند Axsis، میزان عوارض را کاهش می دهد و نتایج را برای هزاران بیمار در سال بهبود می بخشد.
جایگزینی لنز کاتاراکت بزرگترین روش جراحی جراحی در جهان است که هر سال بیش از 300000 عملیات توسط NHS در انگلستان انجام می شود. نتایج به طور کلی بسیار خوب است، اما در بعضی موارد بیمار با دید بدتر از قبل باقی مانده است.
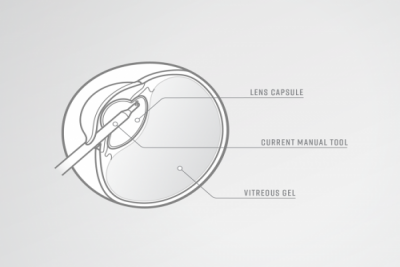
جراحی در حال حاضر با دست تحت میکروسکوپ انجام می شود. ما متوجه شدیم که اگر ما بتوانیم ربات جراحی را در مقیاس مینیاتوری بسازیم، مزایای ثابت روباتیک - مانند مقیاس حرکت و دسترسی به حداقل دسترسی تهاجمی - می تواند نتایج را بهبود بخشد و به امکانات بیشتری برای ارائه این روش کمک کند.

تیم جراحی رباتیک ما با تمرین جراحان برای درک چالش های استفاده از روبات های نسل فعلی برای چشم پزشکی مشغول به کار بود. این روبات ها با طراحی بزرگ، از ابزارهای طولانی و مستقیم استفاده می کنند که برای برنامه های چشم پزشکی مناسب نیست.

طراحی ما با استفاده از موتورهای کوچک، استاتیکی، غیر باربری، اتصالات نورد و سیستم انتقال جدید برای به حداقل رساندن اصطکاک استفاده می شود، نتیجه یک ربات کاملا مشخص است که برای مقابله با رباتیک سنتی جراحی طراحی شده است.
Axsis در حال حاضر ساخته شده است و سازندگان آن در تلاش افزودن قابلیت های جدید به آن هستند.
ابزارههای جراحی مینیاتوری میتواند در اموری دیگر مانند: روش های مداخله زودهنگام برای سرطان و ... همچنین قرار دادن برخی از ایمپلنت های عصبی مصنوعی در بدن استفاده شود.
سخنی از سازندگان
بن لوفوری، طراح مکانیکی:
طراحی مکانیزم موازی امکان استفاده از عملگرهای خطی مینیاتوری با کارایی بالا، ارائه تراکم قدرت بالا و سنجش یکپارچه را فراهم می کند.
Jayna Jogia، ساخت و طراحی مکانیکی:
کار بر روی غشاهای داخل چشم، کار دقیق و ظریفی است که تأثیر قابل توجهی بر کیفیت زندگی بیمار دارد. بنابراین اتصال خطوط 1.8 میلیمتری با کابلهای 0.08 میلیمتر به نحوی قوی برای کنترل و انعطاف پذیری ضروری است.

رودریگو زاپایین، مهندس مکانیک:
با درک رویکرد سنتی در طراحی روبات های جراحی، ما با یک طراحی سینماتیکی روبرو شدیم که ما را قادر ساخت تا تمام اجزای بدنه را فقط به قطر 56 میلی متر برساند.
اریکا کانتور، طراحی مکانیکی:
ما یک راه حل جالب را برای تنش کابل در سراسر محدوده حرکت پیدا کردیم، با استفاده از یک محدوده 2D بهینه سازی شده به صورت عددی برای جبران خطوط کابل غیر خطی.
پ.ن:
کدورت کپسول خلفی یا PC شایع ترین و از مهم ترین عوارض در جراحی نوین کاتاراکت است که با کاهش در عملکرد بینایی بیمار و نیز کاهش در توانایی جراح در دید فوندوس محیطی همراه است. کدورت در کپسول خلفی، عارضهی شایعی است که به ویژه پس از عمل جراحی کاتاراکت در بیماران مبتلا به دیابت قندی دیده می شود، اگر چه زمان ابتلای کدورت متغیر است.
کاتاراکت=آب مروارید
منبع:
https://www.cambridgeconsultants.com/case-studies/axsis-medical-robotic-concept